Challenge Overview
Design, build, program, and test an autonomous robot that can navigate an obstacle course, locate and identify colored cubes (Red, Green, Blue), and place them in their corresponding color-coded locations on an elevated shelf.
Challenge Specifications
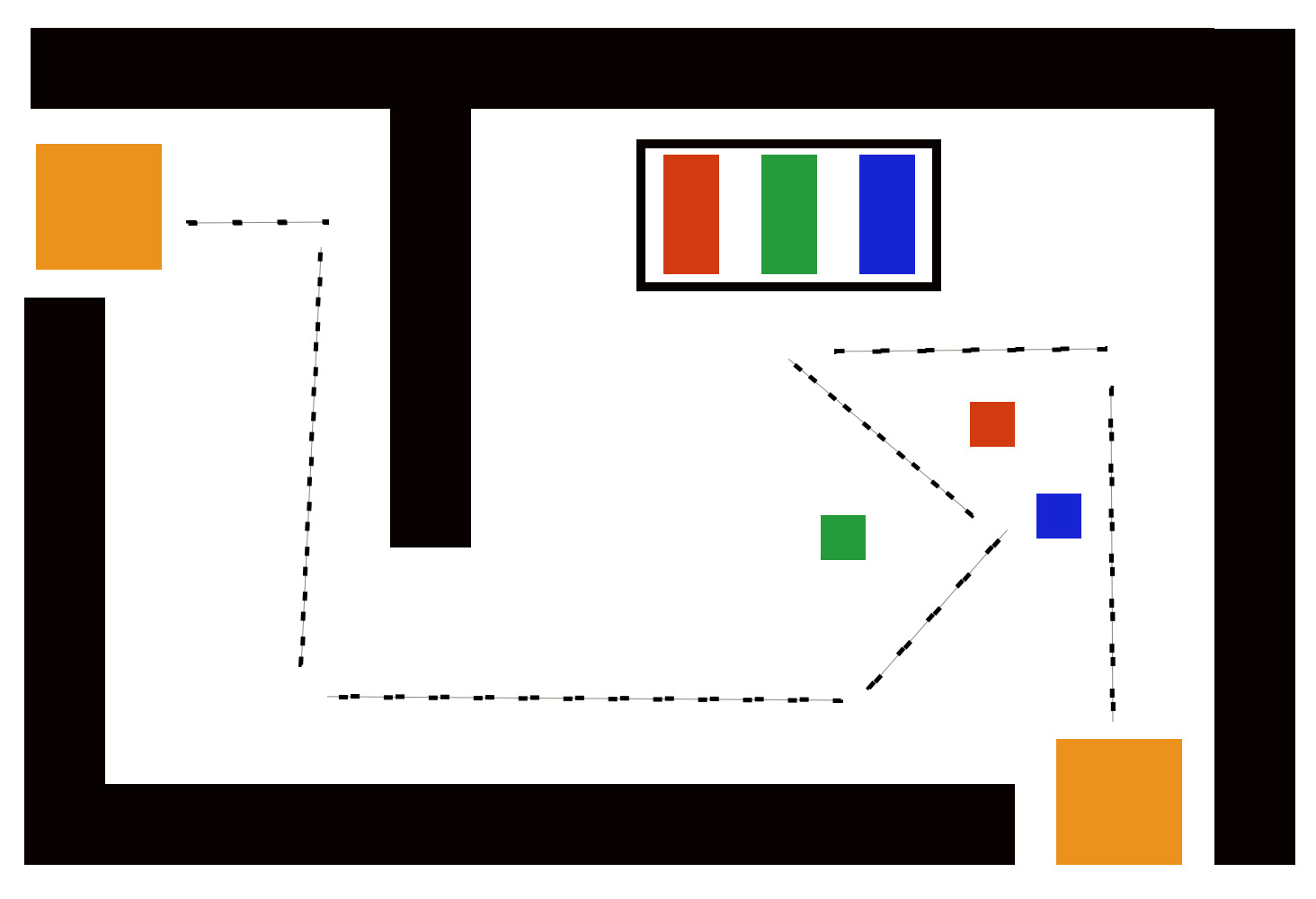
Course Layout
- Starting Zone: Robot begins here and must wait for bumper button press to start
- Navigation Passage: Narrow pathway leading to the main arena
- Collection Area: Open clearing where three colored cubes (red, green, blue) are randomly placed
- Drop-off Shelf: 12-inch high shelf with colored backing (red, green, blue sections visible)
- Ending Zone: Designated area where robot must back into until bumper is pressed
Robot Requirements
- Must use VEX V5 Claw Bot base with claw mechanism
- Must utilize Vision Sensor (front-mounted) for color detection
- Must utilize Range Sensor (front-mounted) for obstacle avoidance
- Must utilize Bumper Sensor (rear-mounted) for start/stop functions
Programming Requirements
Your program must include and demonstrate:
- Variables - Store sensor data, cube status, robot state
- Conditional Statements - Make decisions based on sensor input
- Logic Operators - Combine multiple conditions (AND, OR, NOT)
- Algorithms - Systematic approach to searching, collecting, and placing cubes
Mission Objectives
Primary Objectives
- Start Sequence - Robot remains stationary until bumper button is pressed in starting zone
- Navigate to Collection Area - Robot travels through passage without colliding with walls
- Locate RED Cube - Search and identify red cube using vision sensor
- Collect RED Cube - Pick up red cube with claw mechanism
- Place RED Cube - Navigate to shelf and place cube in red section (12" height)
- Locate GREEN Cube - Return to collection area, search and identify green cube
- Collect GREEN Cube - Pick up green cube with claw mechanism
- Place GREEN Cube - Navigate to shelf and place cube in green section
- Locate BLUE Cube - Return to collection area, search and identify blue cube
- Collect BLUE Cube - Pick up blue cube with claw mechanism
- Place BLUE Cube - Navigate to shelf and place cube in blue section
- Navigate to End Zone - Travel to ending zone after all cubes placed
- Finish Sequence - Back into ending zone until bumper is pressed, then stop and indicate completion (beep/display message)
Secondary Objectives
- Efficient pathfinding (minimal time and movement)
- Error recovery (handle dropped cubes or missed detections)
- Clean code with organization
Deliverables
1
Engineering Notebook
- Problem definition and constraints
- Design sketches and planning
- Pseudocode/flowcharts for programming logic (may be drawn in notebook OR screenshot from flowchart program and save to Class Notebook under your name in Unit 1)
- Testing log with iterations and improvements
- Reflection on challenges and solutions
2
Demonstration Video
2-3 minute video showing:
- Robot design explanation
- Code walkthrough highlighting key programming concepts
- Complete run of the entire obstacle course from start to finish (or best attempt)
- Verbal explanation of what worked and what didn't
3
Code Submission
- Screenshot(s) of your complete VEX V5 Visual Code
- Must show all code blocks used to accomplish the task
- Submit to Class Notebook under your name in Unit 1
Reflection Questions
To be completed in Engineering Notebook or Class Notebook after project completion
- What was the most challenging aspect of this project, and how did you overcome it?
- Explain your algorithm for searching and identifying the colored cubes. How did you make it efficient?
- What would you do differently if you were to complete this challenge again?
- How does this project demonstrate real-world applications of automation and robotics?
- If working in a team: How did your team distribute tasks? What role did you play?
Timeline
- Day 1-2: Design planning, notebook setup, algorithm development
- Day 3-4: Initial programming and testing
- Day 5-6: Refinement and debugging
- Day 7: Video recording of completed course and final submissions
Collaboration
You will work in groups of two students. Both team members must contribute equally and understand all aspects of the project.
⚠️ Safety Reminders
- Obstacle course must be clear when robot is running autonomously
- Keep workspace organized and clear of tripping hazards
- Report any damaged equipment immediately
Standards Alignment
Leadership Standards
- 2.A.1 - Use various types of reasoning (inductive, deductive) to solve navigation and sorting problems
- 2.C.5 - Reflect critically on learning through engineering notebook and video
- 3.B.1 - Work effectively with diverse teams during collaborative project
- 10.A.2 - Prioritize, plan and manage work using timeline and deliverables
- 10.B.1.f - Collaborate and cooperate effectively during team-based work
Industry Standards
- Describe the purpose of automation and robotics (autonomous sorting system)
- Apply knowledge of mechanisms to solve unique problems (claw manipulation, navigation)
- Design, build, wire, and program both open and closed loop systems (sensor feedback loops)
- Troubleshoot malfunctioning systems using methodical approach (debugging and testing)
Washington State Learning Standards
- 2-AP-15 - Seek and incorporate feedback to refine solution
- 2-AP-18 - Distribute tasks and maintain project timeline
- 6-8.1.a - Articulate learning goals and reflect on progress
- 6-8.3.d - Explore real-world problems and pursue solutions
- 6-8.4.a - Engage in design process to create innovative products
- 6-8.7.c - Determine role on team based on knowledge and preference
- SL.8.1.A-B - Come prepared to discussions and follow collaborative rules
- 7.G.1 - Solve problems involving scale (course measurements and robot dimensions)